
В своём исследовании, опубликованном 19 марта в журнале Science Robotics, группа ученых смогла применить принципы беличьих прыжков к роботу Salto, одноногому роботу, способному совершать прыжки и точные приземления. Этот робот является важной частью более широкой работы по созданию роботов, способных перемещаться по сложным ландшафтам, таким как фермы, стройплощадки или лесные кроны деревьев.
Белки, известные своими экстраординарными способностями к прыжкам и маневрированию, являются одними из самых гибких животных в природе. По словам Роберта Фулла, профессора интегративной биологии и одного из авторов статьи, «Белки — лучшие спортсмены в природе». Они могут прыгать, избегать хищников, маневрировать через ветви и приземляться на самых узких и нестабильных поверхностях. Это делает белок идеальными образцами для разработки роботов, которые должны справляться с аналогичными задачами.
Исследовательская команда, возглавляемая Фуллом, с помощью биомеханического анализа приземлений белок изучила, как эти животные при посадке эффективно перераспределяют свою кинетическую энергию, балансируя на ветке. В ходе эксперимента они использовали высокоскоростные камеры и датчики для анализа того, как белки регулируют усилия, направленные на ветку при приземлении, чтобы избежать падений или неудачных приземлений.
На основе полученных данных о биомеханике беличьих прыжков инженеры Калифорнийского университета в Беркли адаптировали эти принципы к роботу Salto. Этот робот был изначально разработан в 2016 году и мог прыгать и паркурить по ровной поверхности. Однако задача заключалась в том, чтобы заставить его приземляться на узкую ветку, а не просто на плоскую поверхность.
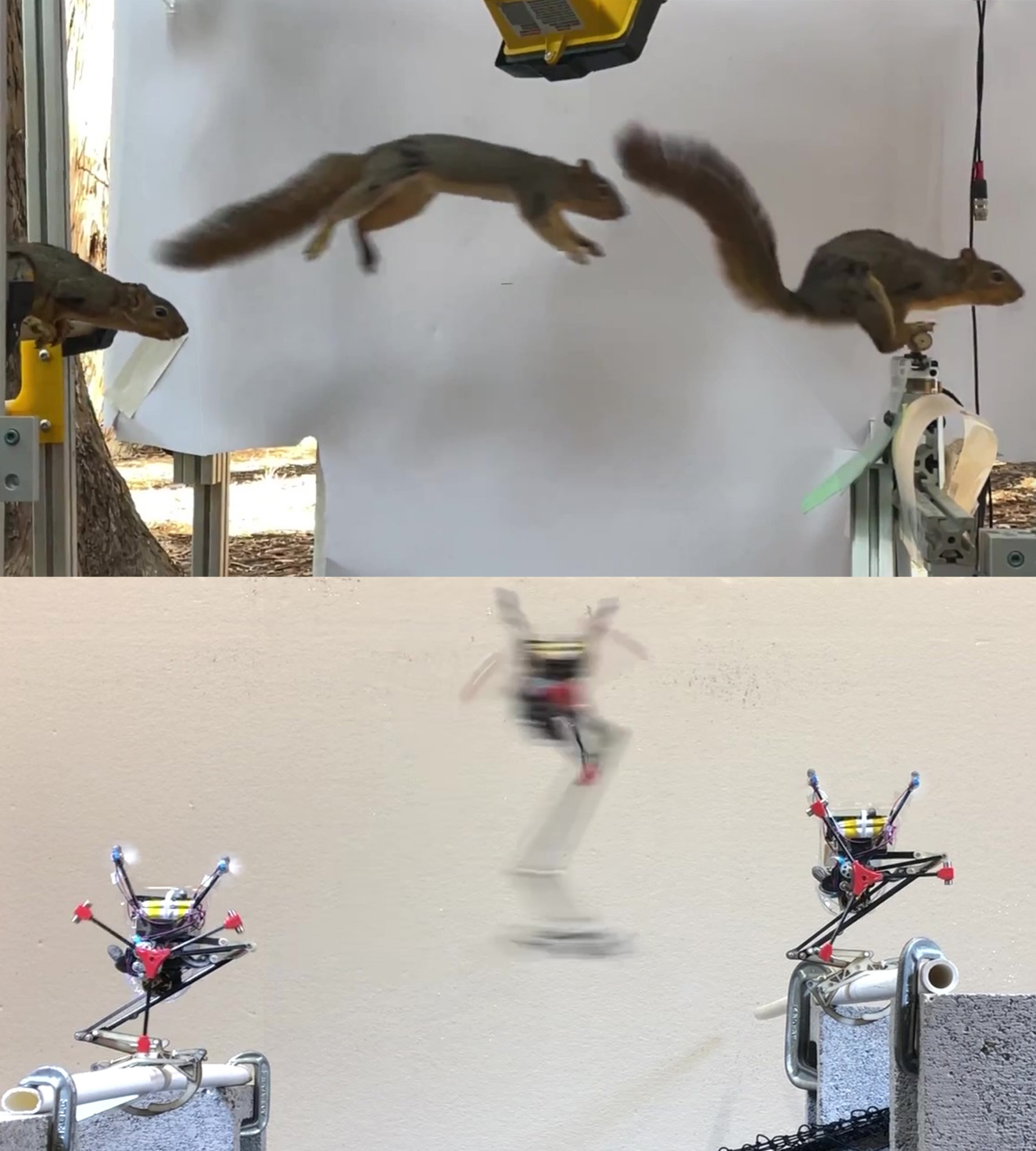
Джастин Йим, соавтор исследования и бывший аспирант Калифорнийского университета в Беркли, адаптировал Salto для выполнения сложной задачи — приземления на стержень. Он использовал идеи из биомеханики белок, чтобы улучшить способность робота балансировать на узкой поверхности. В частности, были разработаны системы для регулирования усилий, приложенных к «ногам» робота при приземлении, что позволило ему компенсировать инерцию и избежать падений.
Йим объясняет: «Когда вы прыгаете, важно правильно приземлиться в точке, не делая лишних шагов. Робот должен быть способен на маленькие корректировки в воздухе, чтобы точно попасть в нужное место». Это был решающий момент, так как предыдущие версии робота могли приземляться только на ровной поверхности.
Одной из интересных особенностей работы является тесное сотрудничество биологов и инженеров. Инженеры пытались перенести знания о биомеханике белок в робототехнику, а биологи исследовали, как белки компенсируют перегрузки и ошибки при приземлениях, используя свои ноги и тело для корректировки пути.
Для того чтобы робот мог точно приземляться, инженеры добавили в конструкцию Salto системы, которые имитируют поведение белки при изменении силы воздействия на ветку. Они также внедрили пассивный захват, чтобы минимизировать излишний крутящий момент, позволяя роботу удерживаться на ветке.
Сейчас Salto может приземляться на узкую ветку, что открывает возможности для использования таких роботов в самых сложных условиях — например, для обследования территорий после катастроф или для мониторинга экосистем в лесах и тропиках.
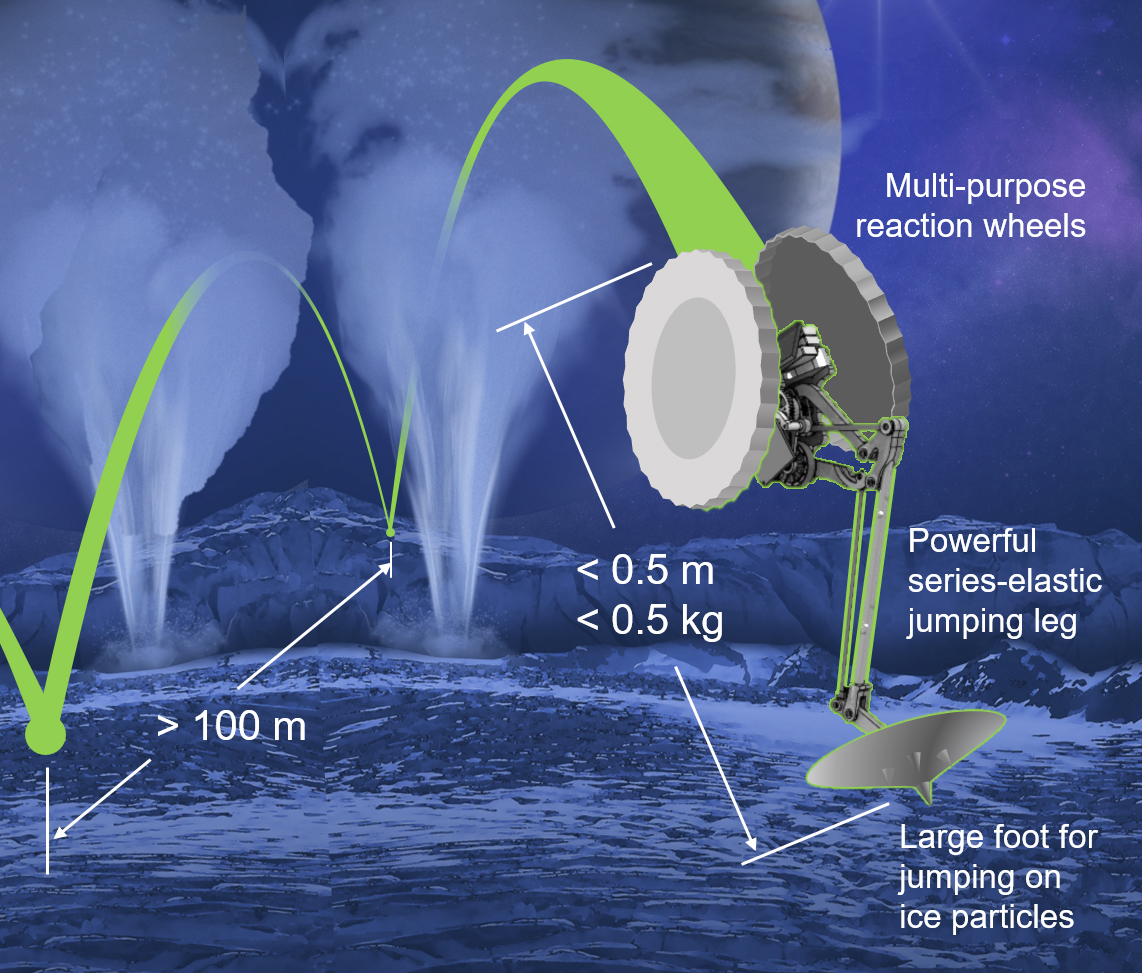
Кроме того, такие роботы могут стать неоценимыми помощниками в строительстве, помогая работать в труднодоступных местах, таких как высокие конструкции или крыши зданий. В дальнейшем будет изучаться возможность использования роботов, подобных Salto, для исследовательских миссий на других планетах, например, для исследования спутников Сатурна, таких как Энцелад.
Эта работа демонстрирует огромный потенциал синергии между биологией и инженерией в создании высокофункциональных роботов. Исследования, вдохновленные природой, могут привести к разработке более гибких, маневренных и адаптивных роботов, способных работать в самых сложных и нестабильных условиях.
Фулл и его команда в Калифорнийском университете в Беркли продолжают изучать, как другие животные могут помочь в создании новых технологий, направленных на улучшение робототехники и взаимодействие роботов с окружающей средой.
Если вам понравился материал, кликните значок - вы поможете нам узнать, каким статьям и новостям следует отдавать предпочтение. Если вы хотите обсудить материал - не стесняйтесь оставлять свои комментарии : возможно, они будут полезны другим нашим читателям!





